今週もマノイについて学んでいきます。参考書は「MANOI PF01パーフェクトガイド」です。
マノイがなぜ様々な動きがなぜできるのかというと、マノイには全身で17の関節を持っています。
その関節にはサーボモーターが組み込まれていて、各関節を動かす筋肉の役目を担っています。
しかもこのサーボモーターは、片足バランスができるほどにパワフルなのです!
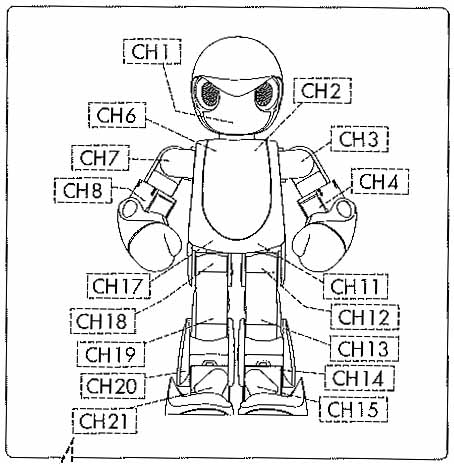
サーボモーター配置図
MANOIパーフェクトガイドより
またこのサーボモーターは、搭載しているコントロールボード(マイコンボード)を経由して、プログラミングによって動かすことができます。プログラムは標準装備されているもののほか、ユーザーが自由に設定することができます。
またマノイには、自身で姿勢が傾いているかどうかを検出するジャイロセンサー(KRG-3)が装備されています。
プログラミングをするにあたって、「Heart to Heart 3」のソフトウェアを使っていきます。
初めて使うので、まず操作方法を学んでいこうと思います。
起動画面はこんな感じです。(Heart to Heart 3操作説明書より)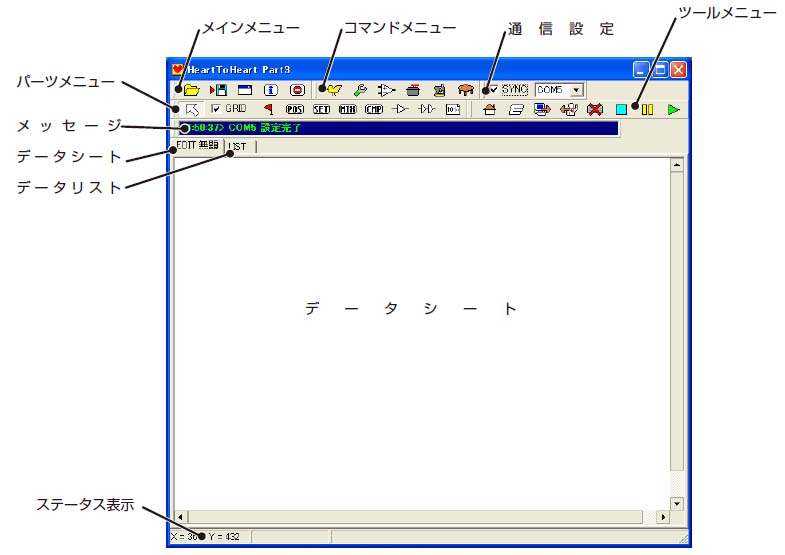
今回はパーツメニューについて紹介します。
パーツメニューはデータシート上に配置するパーツの選択などを切り替える場合に使用します。
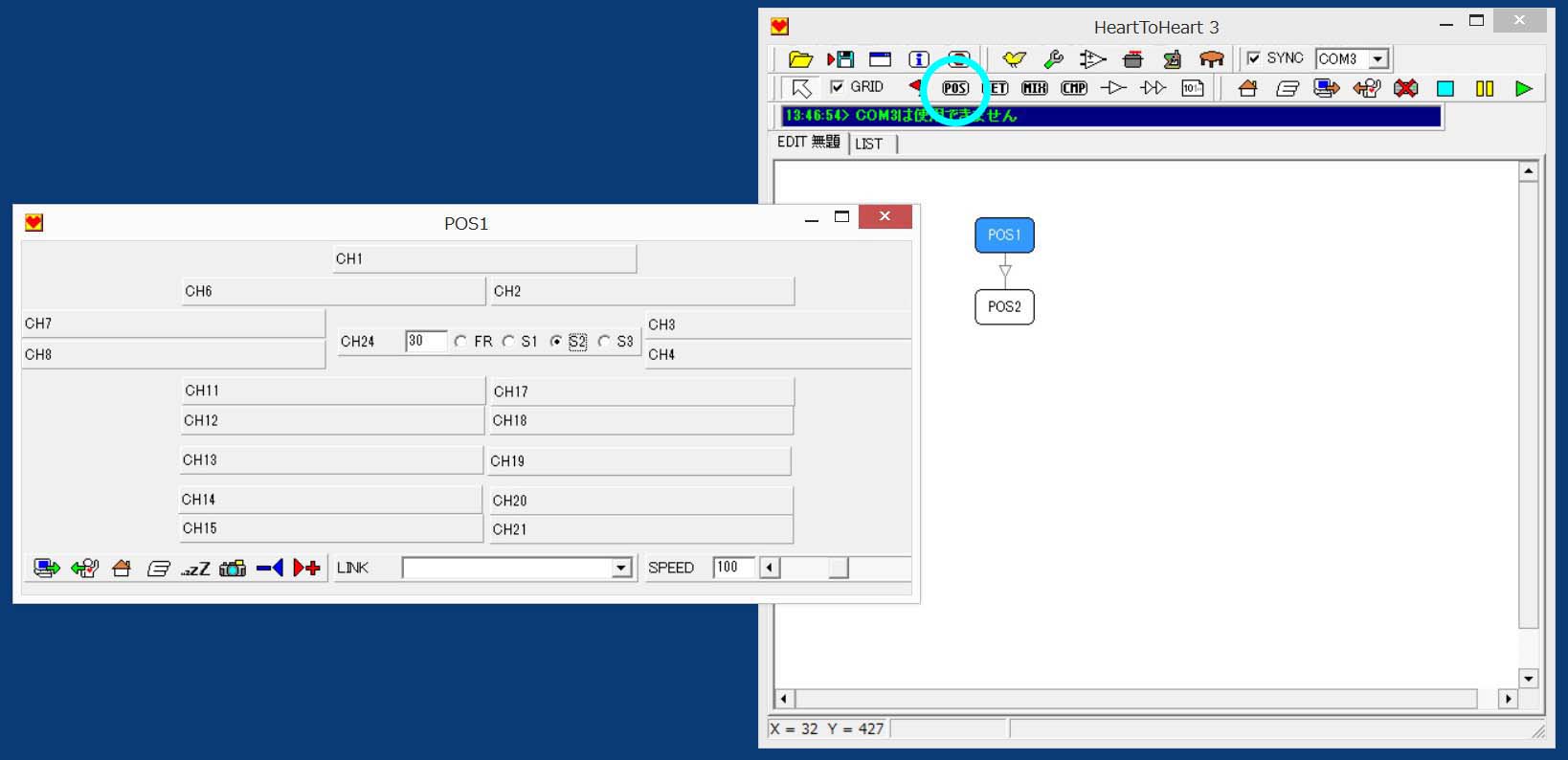
POSボタン(水色の丸印部分)はポジション配置を行います。(画面をクリックすると画面が拡大されます。)
データシート上に、各サーボモータの位置情報やサーボ内部の設定切り替えの指令を配置する場合に選択します。
「POS1」をダブルクリックすると左のグレーのウィンドが開きます。そこでは、先ほどの17個のサーボモーターの信号を出力します。
SETボタン(水色の丸印部分)は設定値配置といい、データシート上に各種設定を行う場合に選択します。(画面をクリックすると画面が拡大されます。)
「SET」をダブルクリックすると、左のグレーのウィンドが開きます。
繰り返しの設定や、実行中のモーション・シナリオから、別のモーション・シナリオに移る時に使用します。
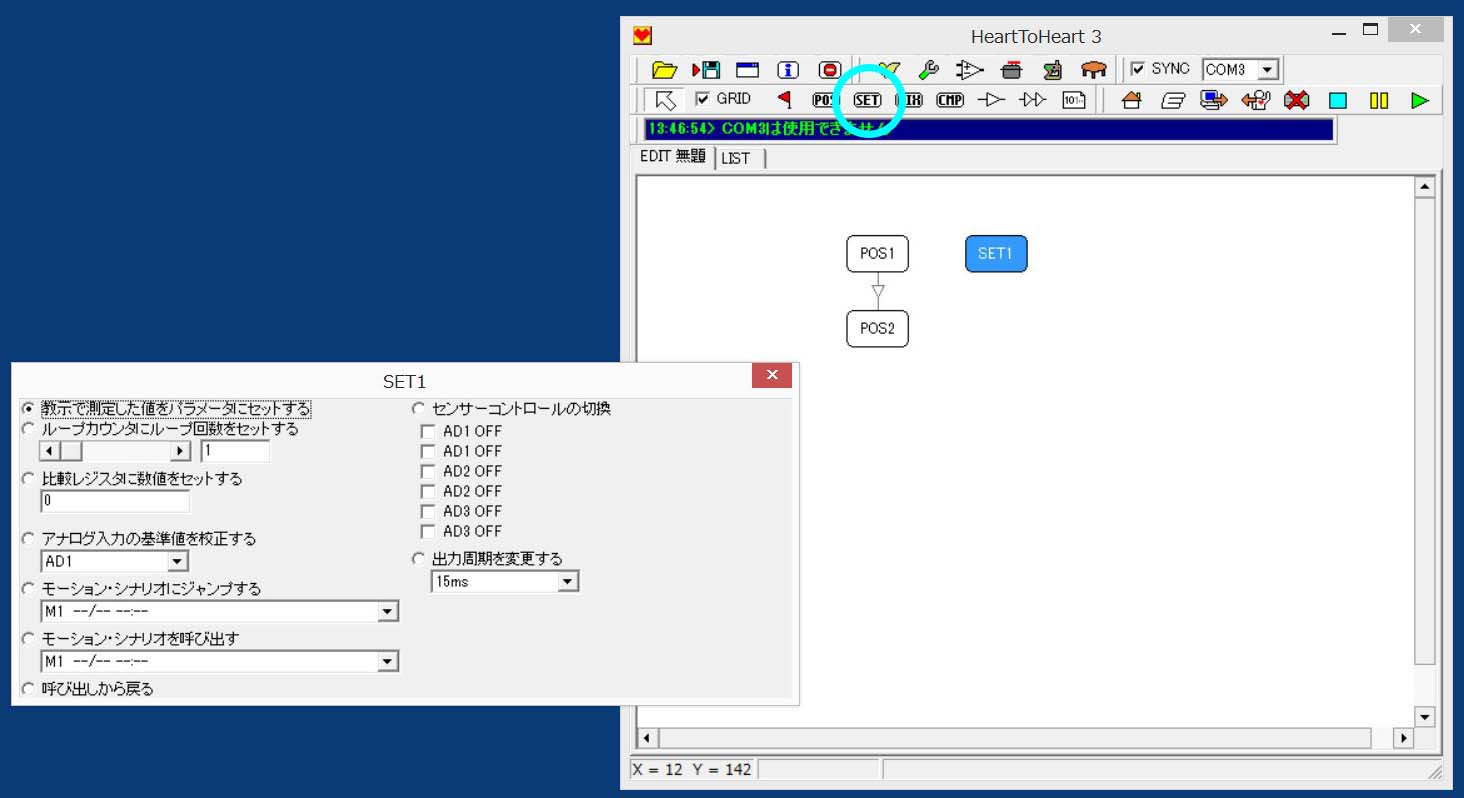
すごく細かく設定できるようですね。どのモーションの時にどの設定が必要になるのか、慣れるのに時間がかかりそうですが、フローチャートを作っていく感覚のようですね。
サイエンスチーム あさおか
