5月28日(土)と29日(日)に当館で行われた「ロボット・アスリートCUP2016」というロボットの運動会を見学しました。
28日は多脚ロボットクラスで、29日は2足歩行ロボットでした。詳しくはこちら→ロボット・アスリートCUP2016
29日はマノイを使用して大会に挑戦した方がいました!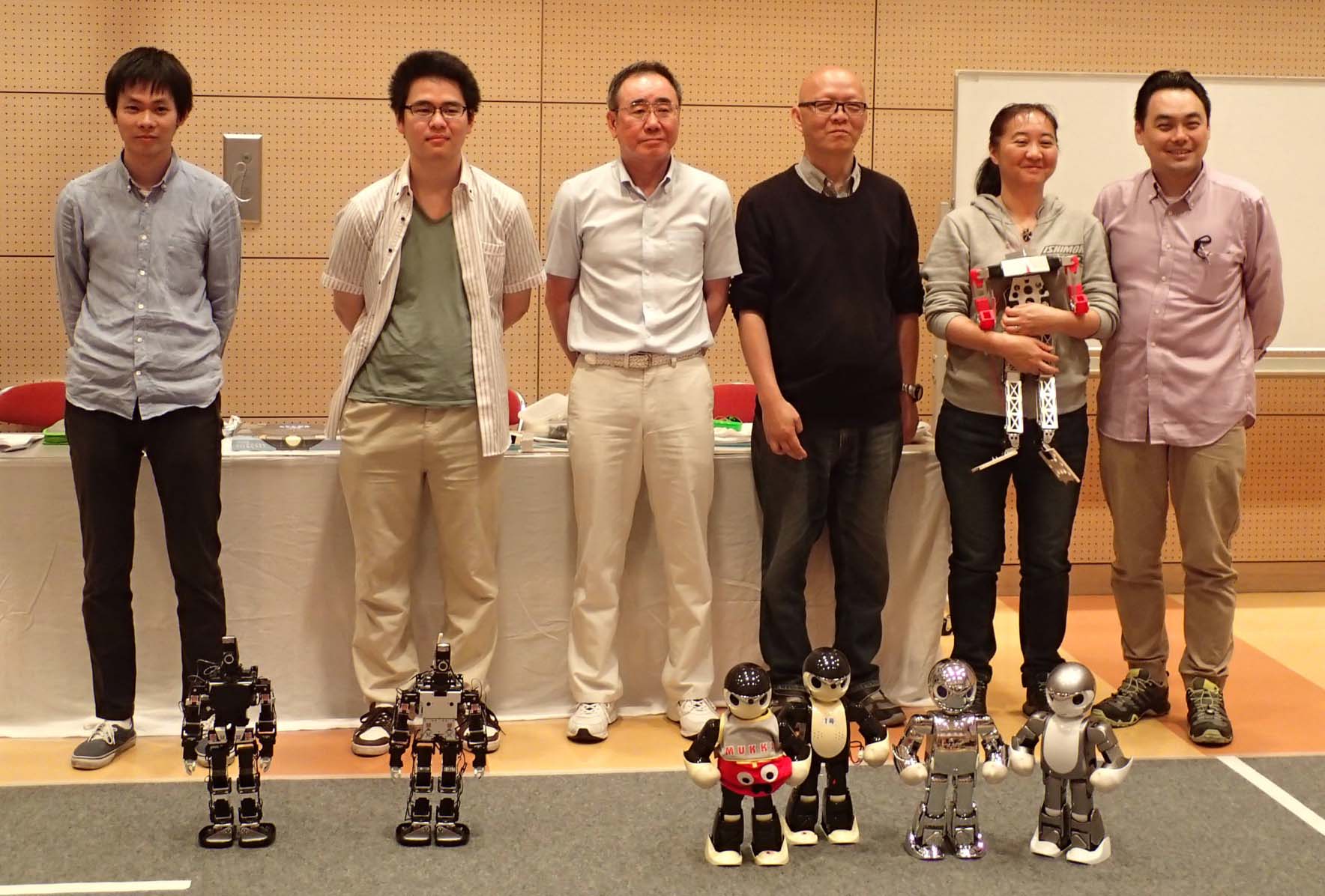
参加種目は、無線5m走行と10m障害走でした。
無線5m走行とは、スタートラインからゴールラインまでの5mを走行する競技です。
ゴールラインに足が掛かるまでのタイムを競って、参加機体ごとに3回走行して最も早いタイムを出したロボットが優勝です。
10m障害走は、コース上に高さ3cm×幅80cmの板状(プラバン)の障害物を、左右のレーンに各2個設置して、その障害物を避ける・飛び越える・または蹴り倒して、5m先のパイロンを回って返ってくる障害物競走です。
結果はこちら(ロボットゆうえんち公式ブログ)
2台とも動きがとても早くて、釘付けになってしまいました!
プログラミングされている「歩く」ペースよりも細やかにすばやく動いていて、更にバランスを保ちながら歩けるようにサーボモーターを調整されているのがすごいなと思いました。
3回タイムを測りましたが、その合間にサーボモーターを調整されている姿を見て、大変そうでしたが自分でマノイを動かす醍醐味と達成感があるんだなと思いました。私もソフトの使い方に早く慣れて、マノイを動かせるようにチャレンジしていきたいなと思えた時間でした。
サイエンスチーム あさおか
